Mesurez les éléments suivants à l'aide d'un oscilloscope:jccarayon a écrit :Je n'ai pas bien compris.
Peut on rapprocher cet aimant ou pas?
Merci d'avance
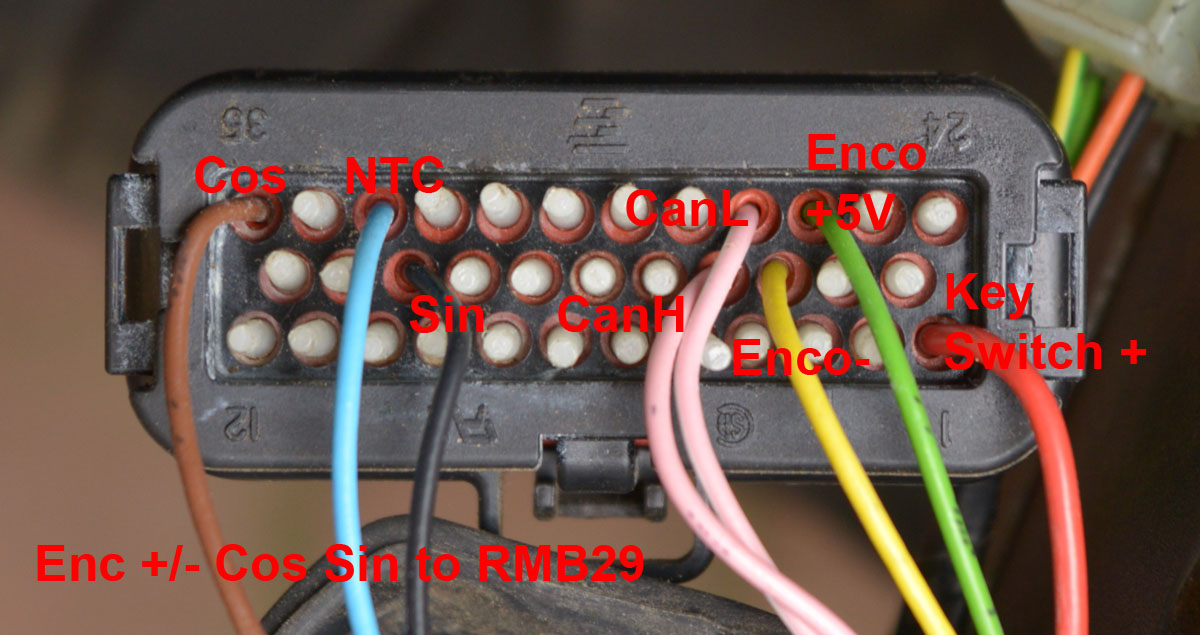
Tension de sortie de Sin lors de la rotation de la roue. Quelle est la tension maximale, minimale et moyenne.
Sortie de tension Cos lors de la rotation de la roue. Quelle est la tension maximale, minimale et moyenne.
Mesurez la tension par rapport à la masse de la carte codeur.
Le jeu de tension dans SEVCON est de 1,90 volts à travers et 4,53 volts de pointe. Alors que la tension mesurée est de 2,29 volts à travers et 4,13 volts de pointe à mon scooter. La différence entre mesurée et réelle est grande, je pense.
Ma recommandation est:
Serrez le capteur Sin Cos de la carte de circuit imprimé et vérifiez s'il est desserré;
Ne retirez pas les vis bloquées, car la position de l'angle est précise.
Vérifiez s'il y a du mouvement dans les bras du vilebrequin du côté droit du scooter;
Remplacer l'encodeur: https://www.rls.si/en/rmb29-rotary-magnetic-module
Reprogrammez le contrôleur SEVCON avec de nouvelles tensions de creux et de crêtes.
J'ai seulement fait la reprogrammation chez un ami. Il a fallu moins de 5 minutes. La solution logicielle est la plus rapide, mais peut-être qu'une solution matérielle fonctionne également. Je n'ai pas essayé la solution matérielle.
Google Translate:
Measure the following using an oscilloscope:
Voltage Sin output when rotating wheel. What is Voltage maximum, minimum, and average.
Voltage Cos output when rotating wheel. What is Voltage maximum, minimum, and average.
Measure the voltage relative to GND of encoder board.
The Voltage set in SEVCON is 1,90 Volt through and 4,53 Volt peak. While the measured voltage is 2,29 Volt through and 4,13 Volt peak at my scooter. The difference between measured and actual is to big, I think.
My recommendation is:
Tighten the printed circuit board SinCos sensor and check if loosly;
Don't remove the locked screws, because the angle position is precise.
Check if there is movement in the crankshaft towarts the right side of the scooter;
Replace the encoder: https://www.rls.si/en/rmb29-rotary-magnetic-module
Reprogram the SEVCON controller with new trough and peak voltages.
I only did the repogramming at an friend. It took less then 5 minutes. Software sollution is the quickest, but maybe an hardware sollution also works. I haven't tried the hardware sollution.